Descripción del producto
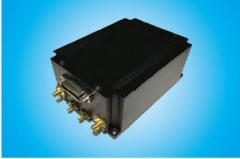
El dispositivo es una plataforma de computadora de control de vuelo aplicada a UAV con estructura laminada de cuatro capas en el interior, que incluye funciones como procesamiento de datos, adquisición de datos, comunicación, transmisión de datos a larga distancia, navegación inercial de dirección, etc. Adopta la pila PC104, construcción de módulo periférico realizada por el bus local del procesador integrado del dispositivo de extensión externo. Este dispositivo contiene un puerto de RS232 y un puerto de RS422, interfaz de depuración para JTAG y UART, navegación inercial incorporada, barómetro, módulo GPS y una base con amortiguador JPMZ-0.5. Toda la estructura del bastidor de la máquina está diseñada con una aleación de aleación de aluminio de aviación, por lo que tiene características obvias de construcción firme y cuerpo ligero. Es una computadora de control de vuelo que integra el control de la aviación con la tarea de cumplir con el control de vuelo autónomo y la misión del avión y helicóptero de alas múltiples / alas fijas.
Ambiente de trabajo
Rango de temperatura ……………… -10 ℃ ~ 65 ℃
Humedad relativa …………… 5 ﹪ ~ 95 ﹪, sin condensación
Vibración de choque ……………… 5g
Especificaciones generales
Dimensiones externas (L × W × H) (sin oreja) ……………… 125 × 150 × 88 mm
Material de la caja ……………… aleación de aluminio de aviación
Aplicaciones Típicas
Construcción de sistema de prueba automático
Automatización de laboratorio, investigación y verificación de diseño
La computadora de control de vuelo, el núcleo del sistema de control de vuelo del UAV, es el dispositivo de solución del sistema de control para realizar la función de cálculo de la ley de control del sistema de control de vuelo y el comando de control de salida al sistema servo. La computadora de control de vuelo también es la parte de administración de todo el sistema, que es responsable del cálculo de administración de redundancia, juicio lógico, conversión del modo de trabajo y logra la declaración del estado del sistema, alarma de falla y función BIT de todo el sistema de control de vuelo. Proporciona interfaces de señal de otras partes del sistema y del sistema al equipo de enlace cruzado integrado en la máquina y procesa las señales.
Podemos personalizar las computadoras de control de vuelo con redundancia de acuerdo con las demandas de los clientes.
● Lograr la gestión de la redundancia y la función de autoprueba a través de hardware y software para cumplir con los requisitos de confiabilidad de la computadora de vuelo y el sistema de control de vuelo confiable.
● De acuerdo con la información del sensor de comando y el sensor de movimiento de vuelo, realiza el cálculo de la ley de control y el resultado se ingresa al servo sistema para controlar el movimiento del actuador del timón.
● Capacidad de autoprueba para cumplir con los requisitos de prueba del sistema y proporcionar circuitos de prueba para otras partes.
● Suministro de energía para algunas otras partes externas.
Guía de selección para computadora de control de vuelo
|
N º de Modelo. |
Descripción |
Tipo de bus |
Temperatura de trabajo |
Portátil |
Controlador integrado |
Potencia máxima de salida |
|
ZY 8DN04-T1 |
Computadora de control de vuelo |
CCDL |
-10 ℃ ~ + 65 ℃ |
- |
√ |
- |
|
ZY 8DN01 |
Computadora de control de vuelo |
CCDL |
-10 ℃ ~ + 65 ℃ |
- |
√ |
- |
|
ZY 8DN02 |
Computadora de control de vuelo |
659 |
-10 ℃ ~ + 65 ℃ |
- |
√ |
- |
|
ZY 8DN03 |
Computadora de control de vuelo |
LBE |
-10 ℃ ~ + 65 ℃ |
- |
√ |
- |
|
ZY12204 |
Computadora reforzada PC104 Framework |
PC104 |
-40 ℃ ~ + 60 ℃ |
√ |
√ |
200W |